From Silicon Labs: "Adding Micrium OS on a Flex Gecko"

About Janos Magasrevy
This blog should serve as a guide to adding Micrium OS on a Flex Gecko and get at least one task running on the device.
I will now share with you my experience while going through this exercise.
Getting Started
I decided to perform a clean installation of Simplicity Studio in order to avoid conflicts inflicted by software updates over time. After installing the tool, before even attempting to add anything, I first had to make sure that I had the necessary SDKs. Here's what I installed:
- 32-bit MCU SDK - 5.5.0.0
- Micrium OS - 5.4.0
- Flex SDK - 2.3.0.0
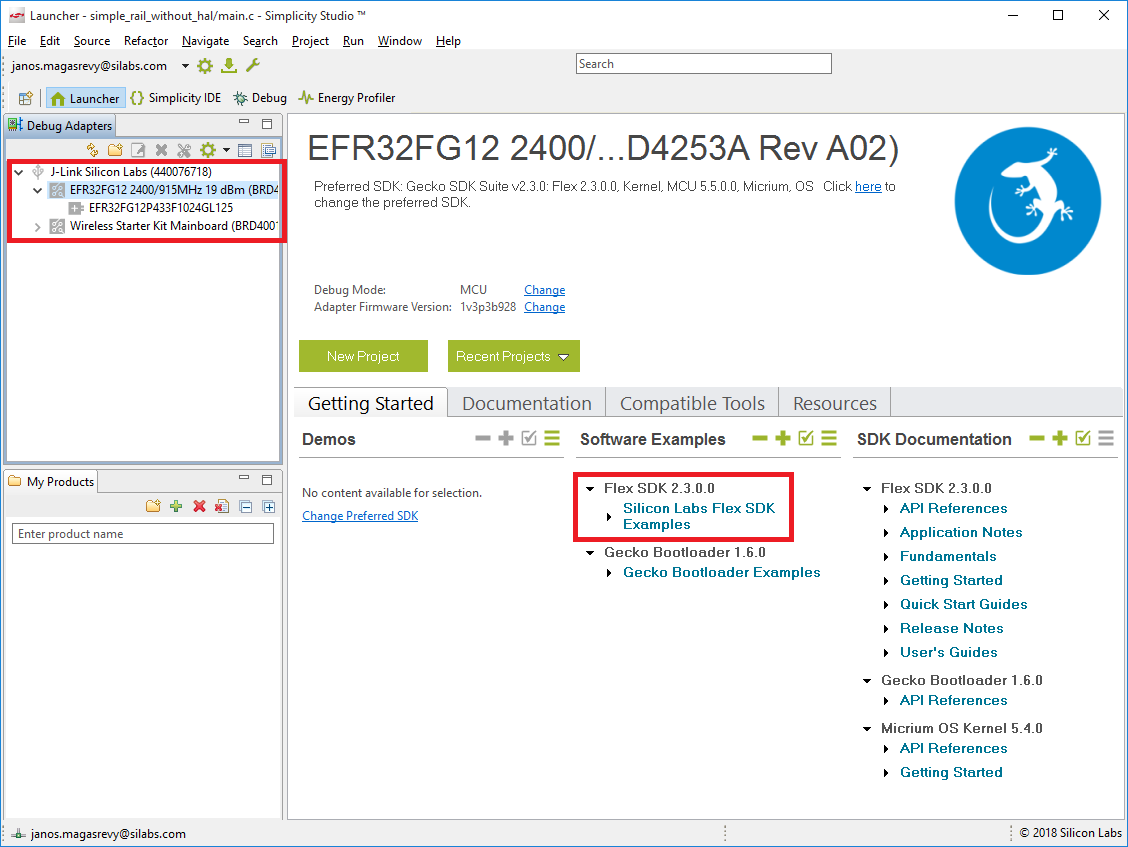
I then mounted a Flex Gecko, EFR32FG12 in my case, onto a Wireless Started Kit Mainboard (BRD4001A). After that, I connected it to the PC using the provided USB cable.
Simplicity Studio recognized a Flex Gecko connected to a WSTK and displayed the link to examples from the Flex SDK (see Figure 1).
Loading a Basic Flex SDK Example
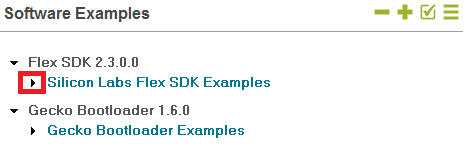
As a starting point, I decided to go with the "RAIL: Simple RAIL without HAL" example from the Flex SDK.
You can find this by expanding the list of projects under the "Silicon Labs Flex SDK Examples" link:
Then find and click the example shown in Figure 3 to add it to your workspace:
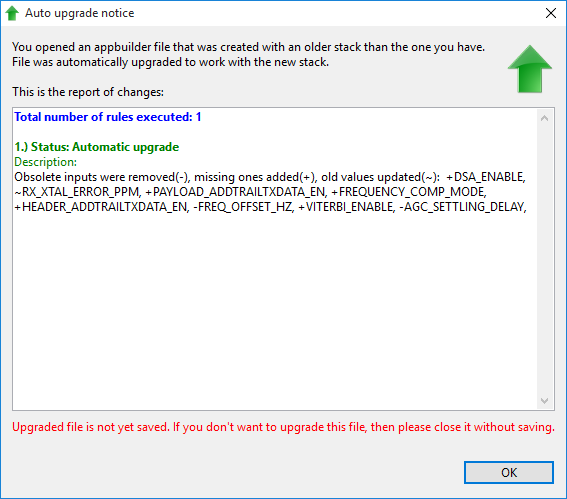
After the example loads on your workspace, you might get a notice as shown in Figure 4. Just click "OK".
You will then be presented with simple_rail_without_hal.isc opened where you can configure RAIL. In my case, I left everything in its default values and simply clicked on "Generate" as shown in Figure 5.
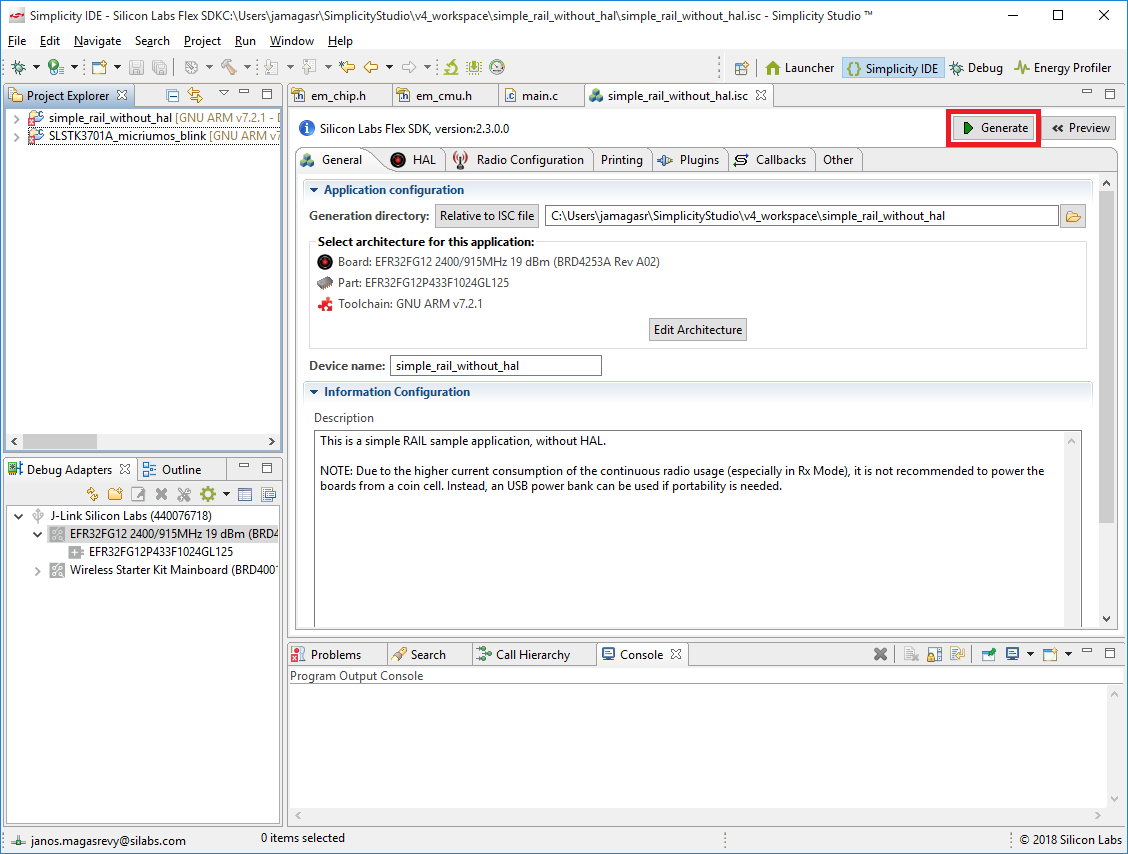
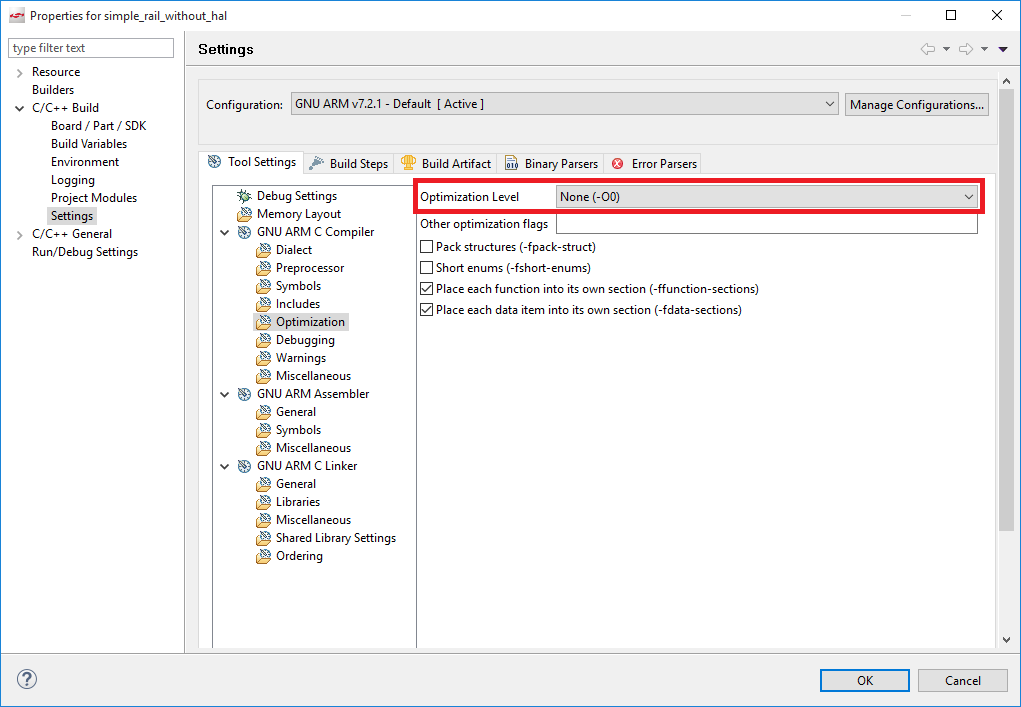
At this point, you should now be set with a basic Flex Gecko example that builds and runs. However, I did find that the default project settings have compiler optimization set to "Optimize for size (-Os)" which will eventually make debugging the project rather difficult. Therefore, I switched optimizations to "None (-O0)".
Adding Micrium OS to the Workspace
Now that you have a basic Flex Gecko example that builds and runs, let's go ahead and start adding the Micrium OS source files into the workspace.
First, locate the Micrium OS directory, it should be in:
C:\SiliconLabs\SimplicityStudio\v4\developer\sdks\gecko_sdk_suite\v2.3\platform\micrium_os
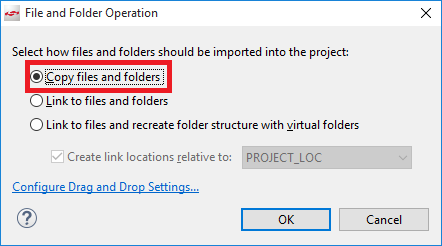
Now drag and drop the "micrium_os" folder into your project (simple_rail_without_hal) in Simplicity Studio. When doing this, make sure that you have "Copy files and folders" selected before clicking "OK" as shown in Figure 7.
You will then have to remove all the unnecessary files that get added with Micrium OS (this was tedious).
Here's how your "micrium_os" folder should end up looking:

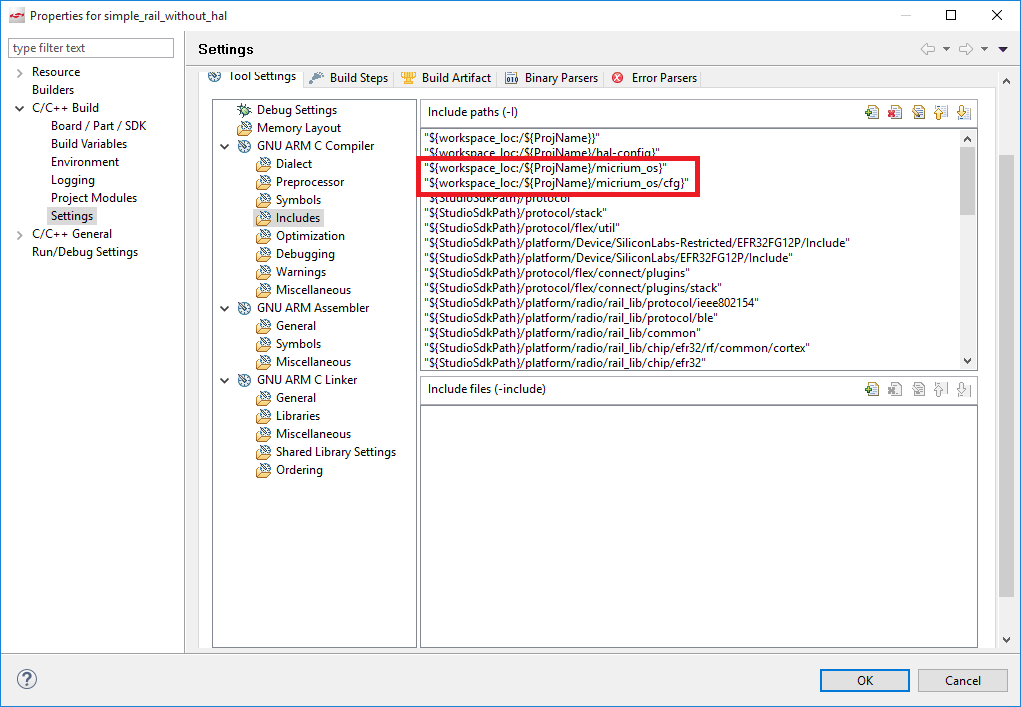
Finally, the compiler needs to know where to look for the header files so we have to add two compiler include paths to the project settings:
"${workspace_loc:/${ProjName}/micrium_os}"
"${workspace_loc:/${ProjName}/micrium_os/cfg}"
Configuring Micrium OS
Now that you have Micrium OS as part of your project, let's go ahead and make some minor adjustments to the default Micrium OS configuration.
- Open rtos_description.h located in your project under "micrium_os/cfg/"
- Replace the contents of the file with one below:
/*
*********************************************************************************************************
* EXAMPLE CODE
*********************************************************************************************************
* Licensing:
* The licensor of this EXAMPLE CODE is Silicon Laboratories Inc.
*
* Silicon Laboratories Inc. grants you a personal, worldwide, royalty-free, fully paid-up license to
* use, copy, modify and distribute the EXAMPLE CODE software, or portions thereof, in any of your
* products.
*
* Your use of this EXAMPLE CODE is at your own risk. This EXAMPLE CODE does not come with any
* warranties, and the licensor disclaims all implied warranties concerning performance, accuracy,
* non-infringement, merchantability and fitness for your application.
*
* The EXAMPLE CODE is provided "AS IS" and does not come with any support.
*
* You can find user manuals, API references, release notes and more at: https://doc.micrium.com
*
* You can contact us at: https://www.micrium.com
*********************************************************************************************************
*/
/*
*********************************************************************************************************
*
* RTOS DESCRIPTION
*
* CONFIGURATION TEMPLATE FILE
*
* File : rtos_description.h
*********************************************************************************************************
*/
/*
*********************************************************************************************************
*********************************************************************************************************
* MODULE
*********************************************************************************************************
*********************************************************************************************************
*/
#ifndef _RTOS_DESCRIPTION_H_
#define _RTOS_DESCRIPTION_H_
/*
*********************************************************************************************************
*********************************************************************************************************
* INCLUDE FILES
*********************************************************************************************************
*********************************************************************************************************
*/
#include <common/include/rtos_opt_def.h>
/*
*********************************************************************************************************
*********************************************************************************************************
* ENVIRONMENT DESCRIPTION
*********************************************************************************************************
*********************************************************************************************************
*/
#define RTOS_CPU_SEL RTOS_CPU_SEL_ARM_V7_M
#define RTOS_TOOLCHAIN_SEL RTOS_TOOLCHAIN_GNU
#define RTOS_INT_CONTROLLER_SEL RTOS_INT_CONTROLLER_ARMV7_M
/*
*********************************************************************************************************
*********************************************************************************************************
* RTOS MODULES DESCRIPTION
*********************************************************************************************************
*********************************************************************************************************
*/
/* ---------------------- KERNEL ---------------------- */
#define RTOS_MODULE_KERNEL_AVAIL
/*
*********************************************************************************************************
*********************************************************************************************************
* MODULE END
*********************************************************************************************************
*********************************************************************************************************
*/
#endif /* End of rtos_description.h module include. */Modifying main.c
We'll be making modifications to the default main.c generated by the "RAIL: Simple RAIL without HAL" example.
Micrium OS requires the following include paths in main.c so go ahead and add them as shown below:
#include <cpu/include/cpu.h>
#include <kernel/include/os.h>
#include <common/include/common.h>
#include <common/include/rtos_utils.h>
#include <common/source/kal/kal_priv.h> /* Private file, use should be limited */We'll be modifying main.c to initialize Micrium OS and create a start task. For that, you'll need to specify a task stack size and a priority. We typically do this by defining them as constants and passing those in the call to OSTaskCreate().
The start task also requires its own Stack and Task Control Block (OS_TCB) as well as its function prototype. Therefore, add the following to main.c:
#define START_TASK_PRIO 21u
#define START_TASK_STK_SIZE 512u
static CPU_STK StartTaskStk[START_TASK_STK_SIZE]; /* Start Task Stack. */
static OS_TCB StartTaskTCB; /* Start Task TCB. */
static void StartTask (void *p_arg);Here's the body of the StartTask function where the kernel tick gets initialize and as well as the Common module. Note that the function includes an infinite loop at the end with a time delay of 1 second. This is done to yield CPU time to other tasks that are or will eventually run on your system. You can copy and paste the following in your main.c:
static void StartTask (void *p_arg)
{
RTOS_ERR err;
CPU_INT32U cpu_freq;
CPU_INT32U cnts;
/* Prevent compiler warning. */
PP_UNUSED_PARAM(p_arg);
/* Determine SysTick reference freq. */
cpu_freq = SystemCoreClockGet();
/* Cal. SysTick counts between two OS tick interrupts. */
cnts = (cpu_freq / (CPU_INT32U)KAL_TickRateGet());
/* Init uC/OS periodic time src (SysTick). */
OS_CPU_SysTickInit(cnts);
#if (OS_CFG_STAT_TASK_EN == DEF_ENABLED)
/* Initialize CPU Usage. */
OSStatTaskCPUUsageInit(&err);
/* Check error code. */
APP_RTOS_ASSERT_DBG((RTOS_ERR_CODE_GET(err) == RTOS_ERR_NONE), ;);
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN
/* Initialize interrupts disabled measurement. */
CPU_IntDisMeasMaxCurReset();
#endif
/* Call common module initialization example. */
Common_Init(&err);
APP_RTOS_ASSERT_CRITICAL(err.Code == RTOS_ERR_NONE, ;);
while (DEF_ON) {
/* Delay Start Task execution for 1000 OS Ticks from now. */
OSTimeDly(1000, OS_OPT_TIME_DLY, &err);
/* Check error code. */
APP_RTOS_ASSERT_DBG((RTOS_ERR_CODE_GET(err) == RTOS_ERR_NONE), ;);
}
}Finally, let's modify main() to initialize the CPU, re-assign interrupt handlers as kernel-aware, initialize the kernel, create the Start Task, and start the OS. Here's how main() should end up looking:
int main(void)
{
uint32_t vtorAddress = SCB->VTOR;
CPU_FNCT_VOID * vtor = (CPU_FNCT_VOID *)vtorAddress;
RTOS_ERR err;
CPU_Init();
/* Re-assign previous interrupt handlers as kernel-aware */
for (uint32_t i = CPU_INT_EXT0; i < CPU_INT_EXT0 + EXT_IRQ_COUNT; i++) {
CPU_IntSrcHandlerSetKA(i, vtor[i]);
}
/* Initialize the Kernel. */
OSInit(&err);
/* Check error code. */
APP_RTOS_ASSERT_DBG((RTOS_ERR_CODE_GET(err) == RTOS_ERR_NONE), 1);
/* Create the Start Task. */
OSTaskCreate(&StartTaskTCB,
"Start Task",
StartTask,
DEF_NULL,
START_TASK_PRIO,
&StartTaskStk[0],
(START_TASK_STK_SIZE / 10u),
START_TASK_STK_SIZE,
0u,
0u,
DEF_NULL,
(OS_OPT_TASK_STK_CLR),
&err);
/* Check error code. */
APP_RTOS_ASSERT_DBG((RTOS_ERR_CODE_GET(err) == RTOS_ERR_NONE), 1);
/* Start the kernel. */
OSStart(&err);
/* Check error code. */
APP_RTOS_ASSERT_DBG((RTOS_ERR_CODE_GET(err) == RTOS_ERR_NONE), 1);
return (1);
}
You are now set to build and run the project. You can put a breakpoint on the Start Task inside the while loop and notice that you'll be hitting that every second (or as specified by the delay you configure in OSTimeDly()).
Please do understand that this is a very basic guide that resembles more a hack rather than an official solution from Silicon Labs. Hopefully, Micrium OS can be part of the Flex SDK in the future, but in the meantime, this is a start.
I hope this was useful to you. Feel free to post any comments or questions regarding this blog post.
Source: https://www.silabs.com/community/blog.entry.html/2018/06/08/adding_micrium_oson-06qC

